-
サーボスカラ JS3シリーズ
Price: Contact-
主な特長
“ピック&プレイス”の動作をプログラミングレスで設定可能
「ピック&プレイス仕様」では、必要な動作をプログラミングレスで簡単に設定ができる
専用のソフトをご用意しております。
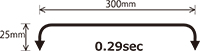
簡単ティーチングで設備の垂直立ち上げを実現します。トップクラスの高速動作と標準サイクルタイム
最高速度:8,300mm/sec 標準サイクルタイム:0.29sec
高速動作と連続動作性の向上で生産性を向上します。
ロボット本体内を通る内部通路を準備
内部配線・配管で周辺機器などの干渉領域を最小に、ケーブル干渉の問題を解決します。
旋回軸動作範囲の拡大
背面エリアもアクセス可能に。無駄な動きが排除でき、ロボット配置の自由度もアップします。

ロボットメンテナンス機能追加
稼働データからロボットの保守・部品交換時期の目安を参照できます。
外部インターフェイスが充実
LAN(イーサネット)、メモリーポート(USB)、フィールドバス*オプション、付加軸(最大2軸まで)*オプション

プログラム作成が簡単
オリジナルのPCソフトやティーチングペンダントを使って簡単にティーチングが行えます。
ティーチングペンダントⅡ (オプション)
対話方式での入力で簡単に直接ティーチングが可能です。
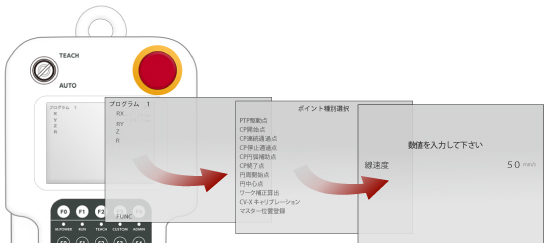
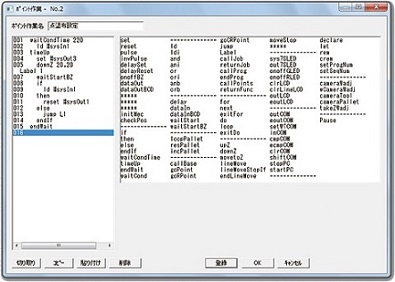
PCソフト『JR C-PointsⅡ』(オプション)
画面上の大きなアイコンを用いて、簡単にプログラムが作成できます。
ティーチングデータ、カスタマイズデータの作成・編集、データの保存が行えます。
また、便利な ポイントグラフィック編集機能(※) もございます。①プログラミングエリア
プログラミングデータは、直接数値を入力、編集することも可能。②基本操作エリア
アイコンを用いて、簡単にプログラムの作成が可能。③ロボット操作エリア
操作アイコンを用いてジョグ操作が可能。
簡易PLC機能内蔵
外部機器との簡単なやりとりであれば、別途外部PLCを用意する必要はありません。
多言語対応
PCソフトは5言語、ティーチングペンダントは11言語に切り替え可能です。
-
-
パルモスカラ JSR4400Nシリーズ
Price: Contact-
主な特長
省エネルギー
パルスモーターと専用マクロステップ駆動回路の組み合わせにより、消費電力を抑制 (消費電力200W)
モデルバリエーション
3軸と4軸の2モデル
コンパクトなオリジナルスタイル
制御回路をロボット本体に内蔵
腕が細いため稼働時の空間占有領域が小さいダイレクトティーチング機能
ツールを直接作業ポイントに手動で移動させることによりポイント入力のスピードがアップ
オリジナルソフトウェア 「JR C-Points」
ねじ締め・塗布・はんだ作業に対応する専用ソフトを用意
カスタマイズ機能
作業データを関数・式として登録し、作業条件などをユーザー独自で設定するオリジナルソフトも作成可能
豊富なプログラム数とポイント数
プログラム数 255、ポイント数30,000(最大)
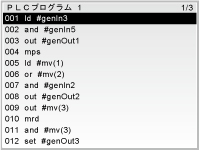
簡易シーケンサー
ロボットの動きとは独立して実行される100プログラムおよび1000ステップの簡易シーケンサーを内蔵
10種類の言語に対応
日本語、英語、フランス語、スペイン語、イタリア語、ドイツ語、韓国語、中国語(簡体字)・チェコ語・ベトナム語と表示言語の切り替えが可能
表示単位切替
座標値をmm/inchで切り替え表示可能
PCソフトウェア「JR C-Points / JR-GLayout」
PCソフト「JR C-Points」は、簡単操作(ユーザビリティ)とロボット言語を取り扱うこともできる高機能を両立させたジャノメのオリジナル対話式プログラム入力システムです。
■PCソフトウェア「JR C-Points」
PCソフト「JR C-Points」は、簡単操作(ユーザビリティ)とロボット言語を取り扱うこともできる高機能を両立させたジャノメのオリジナル対話式プログラム入力システムです。
簡単ティーチング
位置やパラメータの設定だけで簡単にティーチングが可能
高い汎用性
ロボット言語を用いて、I/O制御動作などのユーザープログラムが作成可能(ポイント作業命令を用いてコマンド列を記述)
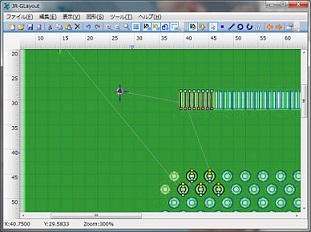
■PCソフトウェア「JR-GLayout」
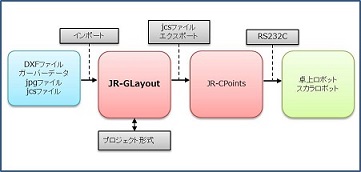
PCソフト「JR-GLayout」は、編集領域にDXFファイル、ガーバーデータ、jpgファイルを取り込み、点、直線(線分)、円、円弧を描画することができるソフトウェアです。
動的アプローチでは困難な位置決めをPC上で正確に行うことが可能です。取り込めるデータ
・DXFファイル
・ガーバーデータ
・jpgファイル
・jcsファイル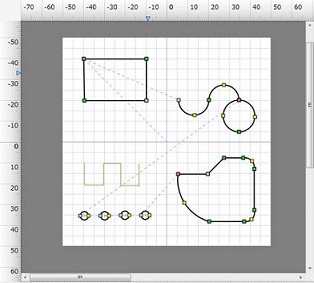
座標情報を編集に活用
DXFファイル、ガーバーデータについてはそれぞれが持つ座標情報を編集することができます。
jcsファイル形式に変換
編集されたポイントデータは、jcsファイル形式でエクスポートすることができ、JR C-Pointsからロボットへ送信できます。
アプリケーション対応
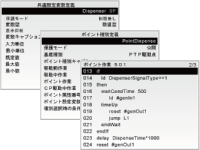
ねじ締め、塗布の専用ソフトを取り揃えています。
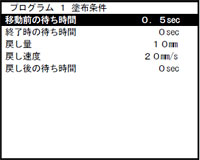
塗布仕様
点塗布、線塗布などのさまざまな塗布条件を作業位置に設定するだけで、簡単に作業プログラムを作成できます。
-
-
卓上ロボット JR3000シリーズ
Price: Contact主な特長
剛性アップ
より高速に、より正確に作業を行え、長期間安心してお使いいただけるように剛性を強化。高速時の軌跡性能を安定させました。
Z機構にカメラを取り付けたときの動作停止時の揺れ時間が大幅に減少して、待ち時間が約半分になりました。(当社比)
JR3300以上のサイズの機種では最高速度900mm/sec、ワーク最大質量15kg、ツール最大質量7kgを実現しました。ロボットケーブル内蔵
高さに制限がある製造現場などに有効。Z軸用ケーブルを内蔵してロボット上部をすっきりとしたデザインにしました。

フィールドバス対応
自動生産ラインや自動機への組込を容易にするためフィールドバスに対応しました。プログラム番号の設定、スタートはもちろん、位置情報の取得やプログラムの書き替えも可能です。
LAN(Ethernet)ポート標準装備
PCと接続しティーチングデータの送受信を行ったり、PCから複数台の運転状況の管理 を行うことも可能です。
ビジョンシステムを容易に導入可能
ますます微細化する製造作業に合わせ、カメラ機能を強化。
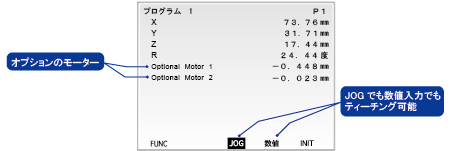
従来からの便利な位置補正機能に加え、自動キャリブレーション機能やカウンタ付CCDカメラ補正機能などの機能を追加しました。最大4軸+外部2モータを制御:補助軸機能(オプション)
ステッピングモータやサーボモータなど「パルス列入力タイプ」の装置2個までを、ロボットの軸を扱うのと同じようにティーチングペンダント上でティーチングできます。「ターンテーブルを設置しワークの向きを変える」「コンベアを設置し、ロボットから制御する」など使い道はさまざまです。
ティーチングペンダントは11種類の言語に対応
海外でもより多くのスタッフが利用できるように、ティーチングペンダントの表示言語は日本語、英語、フランス語、スペイン語、イタリア語、ドイツ語、韓国語、中国語(簡体字・繁体字)、チェコ語、ベトナム語の11言語から選択可能です。
オリジナルのシステムソフトウェア
ねじ締め作業用・塗布作業用の専用ソフトと、汎用性の高い標準用ソフトを用意しております。
※その他の簡単ティーチング、ラビリンス構造、カスタマイズ機能、簡易PLC、表示単位切替などの特長は、JR-2000Nシリーズから継承されています。システムソフト – 初心者からプロフェッショナルまで使える当社オリジナルのシステムソフトを内蔵
アプリケーション別の専用ソフトなので初心者でも簡単ティーチングが行えるほか、コマンド群をさらに充実させ、多彩なコマンドを使用することも可能です。
カメラの自動キャリブレーション
ビジョンシステムを用いて位置補正を行いたい場合、今まで手間のかかっていた、カメラのキャリブレーション(カメラの座標をロボット座標に変換)が、カメラ側のキャリブレーションマーク登録を行えば、あとは自動で行えるようになりました。
お使いいただけるカメラ*2
[メーカー] Panasonic (型式)A110・A210、PV200・PV260・PV300・PV500
[メーカー] Keyence (型式)CV3000、CV-X100・CV-X200・CV-X400、XG-8000・XG-Xシリーズ
[メーカー] OMRON (型式)FHシリーズ、FQシリーズ
*2 生産が終了している場合もございます。詳細はメーカーにお問い合わせ願います。
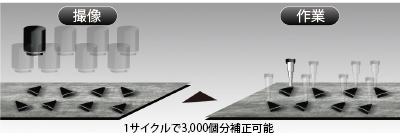
カウンタ付CCDカメラ補正機能
カメラで位置補正を行いながら作業をする機能を強化。ロボットに最大3,000個の補正値を取り込めるので、パレット上に並べられたワークピースに作業を行う場合、「撮像」→「作業」→「次のワークピースの撮像」→「次のワークピースへの作業」・・・、の繰り返しではなく、「連続して撮像」→「連続して作業」が可能となり、作業時間短縮に大変有効です。
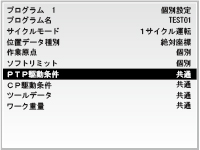
全プログラム共通設定
全てのプログラムに同一設定を行うことの多い「作業原点」「ソフトリミット」「PTP駆動条件」などの項目で共通設定が行えるようになりました。設定を一回行うだけでよいので、ティーチング時間の短縮や条件見直し時に役立ちます。もちろん、任意に個別設定に切り替えることもできます。
4軸ニードルアジャスタ機能
塗布機でノズル先端位置を記憶しておくことで、ノズル交換やシリンジ交換でノズル先端に位置ズレが生じた場合、そのズレ量を検出・補正し、交換前と同じように塗布が行える「ニードルアジャスタ機能」が、従来の3軸機に加え、4軸機でも行えるようになりました。シリンジ交換時のノズル位置の調整に手間取っている場合は是非ご利用ください。

エラー履歴
エラーの発生日時が表示可能になりました。
発生時間の特定も出来ますので、エラー原因の解析にも役立ちます。
エラー履歴は、直近の1,000件分保持できます。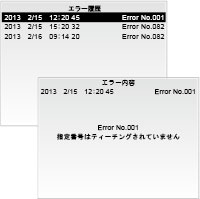
簡易PLC機能
ロボットの機能とは独立して動作する簡易PLCを内蔵しているので、外部機器との簡単なやり取りであれば別途購入する必要はありません。
カスタマイズ機能
ポイント作業データでよく使う命令列を登録したり、お客様独自の専用ソフトを作成することも可能です。
-
卓上ロボット JR3000シリーズ JR3303EBV シリーズ基板分割機
Price: Contact-
主な特長
卓上型の基板の外形加工機
基板の外形加工をルーターカット方式*で行える卓上型の基板分割機です。
上方式、下方式と2タイプの集塵方式をご用意*基板の外形加工にはルーター加工やプレス加工、Vカット方式などがあり、
ルーターカット方式は円形のルータービットを用い、円弧保管のプログラムにより曲線加工も容易に行える加工方式です。滑らかな切断面&軌跡
ルーターカット方式の採用により、基板へのストレスが少なく、きれいな切断面を実現。
高性能ロボットのCP制御で曲線・直線のカットも可能です。省スペースを実現
集塵機の設置が不要なので省スペースでの設置が可能です。
下方集塵式 -JR3303EBV – の新機能
ランニングコストが抑えられる機能を搭載。
-
- ルータビット数倍長持ち*
有効溝長(規定値3.5mm)と分割数(2~9)を設定でき、最大9倍長く利用できます。*設定する分割数や基板の厚みによって異なります。
-
- スピンドルモータのメンテナンス回数減
切粉を下に吸い込むことで、上部のスピンドルモータに負担をかけず、上方集塵式に比べてメンテナンス回数を低減できます。
刃物の交換設定(時間)が可能な便利機能
自由に交換タイミングを設定できる「お知らせタイマー」。
安全機能
ルーターへ過負荷が発生した場合や、ロボットの位置ズレを検知すると、緊急停止する安全機能を搭載。
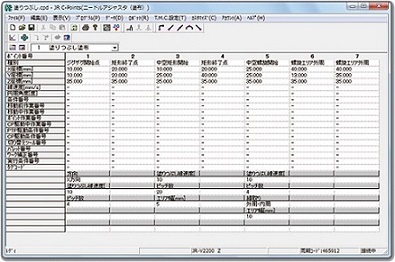
切断時にかかるトルク量をインジケータで表示。オリジナル簡単ティーチング - PCソフト『JR C-PointsⅡ』※ (オプション)
※ティーチングデータやカスタマイズデータの作成・編集・保存をパソコン上で行えるジャノメのオリジナルプログラム入力システムです。
簡単・分かりやすい大きなアイコン
面上の大きなアイコンを用いて、簡単に切断プログラムの作成ができます。
①プログラミングエリア
プログラミングデータは、直接数値を入力、編集することも可能。②基本操作エリア
アイコンを用いて、簡単にプログラミングの作成が可能。③ロボット操作エリア
操作アイコンを用いてジョグ操作が可能。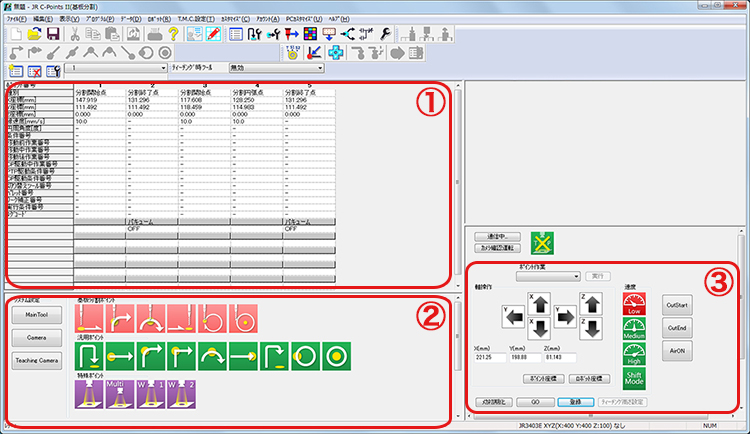
USBカメラ(オプション)によるカメラティーチング
USBカメラを接続することにより、PC上の拡大映像よりポイントを指定、アイコンを選ぶだけで簡単、正確なティーチングが可能です。
ポイントグラフィック編集機能
DXFファイル、ガーバーデータ、jpgファイルを取り込み、点・直線(線分)・円・円弧を描画することができる機能。
動的アプローチでは困難な位置決めをPC上で正確に行うことができます。
DXFを基にして、より簡単に切断プログラムを作成できます。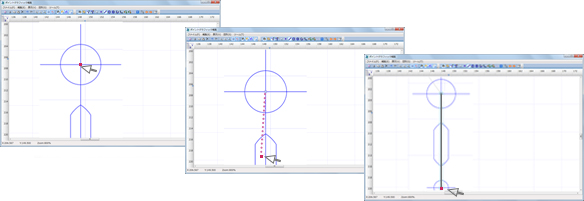
ツールオフセット機能
刃物の太さを指定すると、その半径分の軌跡をオフセットさせる機能。
多言語対応
PCソフトの言語は日本語、英語、ドイツ語、中国語(簡体字・繁体字)で切り替え可能です。
ティーチングペンダントは11種類の言語に対応
日本語、英語、フランス語、スペイン語、イタリア語、ドイツ語、韓国語、中国語(簡体字・繁体字)、チェコ語、ベトナム語と表示言語の切り替えが可能。
プログラム数
カットプログラムは最大999プログラム、32,000ポイント。
多品種・少量生産に最適。 -
-
-
卓上ロボット JR3000シリーズ カメラ搭載塗布仕様
Price: Contact-
主な特長
オールインワンパッケージロボット
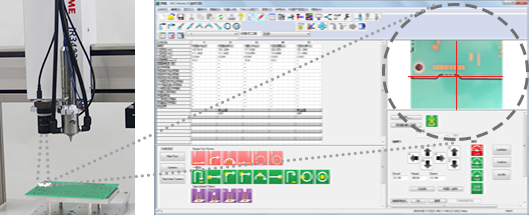
精密塗布を必要とするワークに対応するため、剛性・精度の高いJR3000シリーズと、マシンビジョンに最適なカメラ・レーザー変位計・ニードルアジャスタとを合わせ、1つのパッケージにしました。
かんたん設定
これまで煩雑だったカメラのキャリブレーションやセンサーの設定、ティーチングまでを、1つのPCソフトで誰でも簡単に行えるようにしました。
かんたん操作
PC画面は「プログラムエリア」「カメラ画像エリア」「基本操作エリア」「ロボット操作エリア」を一画面に集約した明瞭なインターフェースで、誰でも簡単に操作ができます。
3種類の補正機能による高精度塗布
- カメラによるX,Y方向の位置補正
- レーザー変位計によるZ方向の高さ補正
- ニードルアジャスタによるノズル先端の位置ズレ補正
これら3種類の補正機能で常に安定した塗布を実現します。
※その他ロボットの主な特長についてはJR3000シリーズの製品情報をご覧ください。PCソフト「JR C-Points II」カメラ搭載塗布仕様
キャリブレーションやセンサーの設定などの初期設定から、補正プログラムの作成やモニター映像での位置設定など、すべての設定がPCソフト上でできるカメラ搭載塗布仕様専用のソフトウェアです。
明瞭な画面構成
・プログラムエリア
ポイント別のプログラミングデータを表示。直接選択して、値を編集することも可能。・基本操作エリア
プログラミングはアイコン選択方式で、誰でも簡単にプログラミングが可能。・カメラ画像エリア
拡大したカメラ画像で精密な位置指定が可能。カメラ画像をクリックすると、その位置が画像の中心になるようにロボットが動作。・ロボット操作エリア
カメラ画像を見ながらジョグ操作。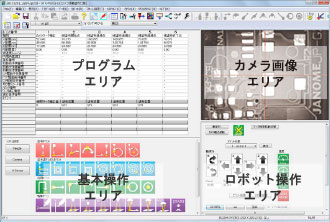
自動キャリブレーション
捨て打ちした跡をカメラで写すだけで自動キャリブレーションを行います。
(十字マークでニードル位置を合わせ、カメラで撮影する方法もあります。)
簡単ティーチング
ティーチングはJOG操作で移動し、カメラ画像で位置を合わせて作業内容のアイコンを選ぶだけ。誰でも簡単にプログラムできます。

アイコン
プログラム時によく使われる30種類以上の設定が大きなアイコンになっていて、位置補正も簡単にプログラムできます。
 線塗布開始点
線塗布開始点
 点塗布
点塗布
 カメラワーク補正撮影点
カメラワーク補正撮影点
 Zセンサー線塗布開始点
Zセンサー線塗布開始点
補正機能
■カメラ補正
ワークがズレても補正しながら塗布作業。
■連続高さ補正
レーザーセンサーでワークの高さを連続測定。塗布面の高さが変化するワークでも一定のクリアランスで正確に塗布を実現。
■ニードル補正
ノズル交換などでニードル先端が位置ズレしてもニードル先端を自動検出して補正。
-
-
卓上ロボット JR3000シリーズ 高可搬仕様
Price: Contact主な特長
最大ツール質量が15kgにアップ
大型の液剤タンクや、ヒーターを含んだホットメルト塗布装置など、質量の大きいツールが使用可能に。


2液混合塗布や複数のシリンジを持たせた塗布装置など
最大ワーク質量が20kgにアップ

重いワークにも対応
Z軸ブレーキ搭載
非常停止時や主電源遮断時のZ軸の落下を防ぎます。
ソフトウェアは汎用性のある標準ソフトと塗布作業専用ソフトを用意
- フィールドバスには対応しておりません。
- その他詳細につきましては、カタログ・外形寸法図のダウンロード、またはお問い合わせください。
-
卓上ロボット 卓上型多機能検査装置 i22Xシリーズ
Price: Contact主な特長
多彩な検査内容
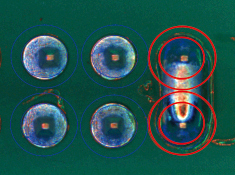 DIPはんだ検査
DIPはんだ検査
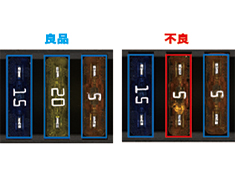
部品違い・色違い検査
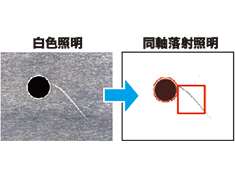
キズ検査
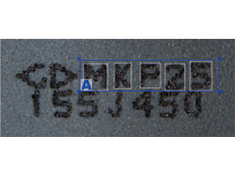
文字検査
(オプションでOCR可)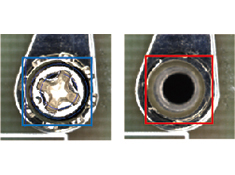
ネジ有無
各種バーコード読み取り
トレーサビリティ対応
検査結果・バーコード情報を自動保存
生産管理ソフトウェア Catch System ※オプション(別売り)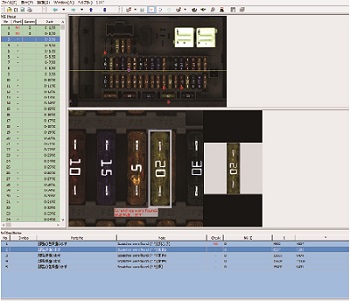 検査時の画像を確認・修理記録
検査時の画像を確認・修理記録
(CS-Repair)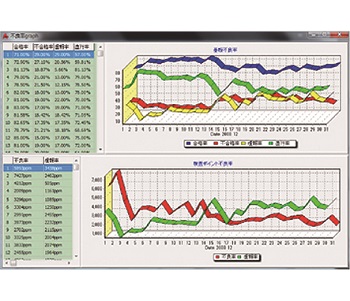 月間グラフで生産状況を把握
月間グラフで生産状況を把握
(CS-Analyzer)検査範囲最大500mm
検査ステージフリースペース設計
検査用途に合わせた照明選択
白色照明・同軸落射照明・RGB照明・赤サイド照明など
装置構成
検査機本体・PC・ディスプレイ・コントローラ・スイッチBOX

-
産業用ロボット-MELFA
Price: Contact生産性のために装備しました。
MITSUBISHI MELFA産業用ロボットは、高速かつ高精度の性能とインテリジェントな技術の組み合わせによる細胞製造に適しています。
三菱のPLCやFA機器と簡単に接続できます。































Head office: 8th Floor Block Lucky Richmond City, 207C Nguyen Xi, Ward 26, Binh Thanh District, HCMC
Phone: (028) 7300 4577 I Hotline: 0931 477 868 I Email: sales@ideatechmart.com I info@ideatechmart.com
All Rights Reserved. Terms & Policy
Copyright © 2020 ideatechmart.com. All rights reserved. IDEA TECHNOLOGY TRADING JOINT STOCK COMPANY. Business Registration Certificate: 0312507998 issued on October 16, 2013 at the Department of Planning and Investment of Ho Chi Minh City
Phone: (028) 7300 4577 I Hotline: 0931 477 868 I Email: sales@ideatechmart.com I info@ideatechmart.com
All Rights Reserved. Terms & Policy
Copyright © 2020 ideatechmart.com. All rights reserved. IDEA TECHNOLOGY TRADING JOINT STOCK COMPANY. Business Registration Certificate: 0312507998 issued on October 16, 2013 at the Department of Planning and Investment of Ho Chi Minh City