Các phương pháp định vị dẫn đường AGV
Tự động hóa là xu hướng phát triển tất yếu của ngành sản xuất công nghiệp trong tương lai, là xu hướng tự động ứng dụng các hệ thống điều khiển thông minh như cánh tay robot, phần mềm quản lý và giám sát nhà máy thông minh,… để thực hiện các quy trình hoặc thủ tục mà không cần sự trợ giúp của con người. Đặc biệt, trong số các công nghệ tự động được áp dụng trong tương lai, có thể kể đến Xe tự hành AGV. Vậy xe tự hành AGV là gì? làm sao nó lại được cho là một hệ thống tự động trong tương lai?

Hệ thống tự động hóa trong tương lai sẽ liên kết tất cả các sản phẩm một cách tự động.
Trong bài viết này, chúng ta sẽ cùng tìm hiểu về xe tự hành AGV và các phương pháp giúp robot AGV có thể xác định vị trí chính xác của nó trong không gian và cách di chuyển của nó nhé.
Xe tự hành AGV là gì?
Xe tự hành AGV, hay Robot tự hành AGV (Tiếng anh gọi là Automation Guided Vehicle) là loại xe sử dụng các công nghệ dẫn đường để tự động vận chuyển hàng hóa, thành phẩm, nguyên vật liệu đến những địa điểm đã được đánh dấu sẵn mà không cần đến sự can thiệp của con người. Xe tự hành AGV hay còn được gọi là Robot kéo hàng, Robot chở hàng, robot vận chuyển hàng tự động.

Xe tự hành AGV/AMR do công ty IDEA chế tạo
Các phương pháp định vị vị trí, dẫn hướng của AGV
Có một vài phương pháp để xây dựng bản đồ và đánh dấu môi trường xung quanh, để nhận biết vị trí robot tự hành AGV. Mỗi phương pháp đều có ưu và nhược điểm khác nhau. Hiện tại có 3 phương pháp được dùng phổ biến như sau:
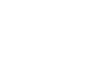
1. Phương pháp sử dụng cảm biến LiDAR
Robot tự hành AGV chủ yếu sử dụng công nghẹ dẫn đường LiDAR (Light Detection and Ranging) tạm dịch là “Phát hiện và đo lường bằng tia laser”. Robot LiDAR AGV đo khoảng cách tới đích bằng cách làm nổi bật vật đích bởi tia laser. Thời gian cũng như bước sóng tia laser phản hồi về được dùng để mô phỏng vật thể đích bằng không gian 2 chiều hoặc 3 chiều.
Cảm biến Lidar phát ra một dãy tia laser để xác định vị trí và định hướng di chuyển
LiDAR AGV phát chùm tia laser trong quá trình di chuyển, cùng lúc đó robot này thu tín hiệu laser để về xác định bản đồ và xác định vị trí của AGV.
Sóng siêu âm: robot AGV cũng có thể dùng sóng siêu âm để định vị. Sóng siêu âm là công nghệ cũ so với LiDAR và ít tốn kém hơn, tuy nhiên độ chính xác thì kém hơn nhiều so với laser.
2.Phương pháp định vị bằng hình ảnh
VGV (Vision Guided Vehicle, tạm dịch robot dẫn đường bằng hình ảnh) thường dùng often use stereo or triclops system để đo khoảng cách. Việc sử dụng hình ảnh như vậy, có thể nói như cách con người nhìn thế giới xung quanh, do vậy dữ liệu thu được sẽ đa dạng và phức tạp hơn nhiều so với công nghệ laser hay sóng siêu âm.
Vấn đề hiện nay đó là công nghệ hình ảnh đưa về dữ liệu quá lớn & giá trị, để xử lý hiệu quả dữ liệu này thì cần thuật toán cũng như hệ thống mạnh. May mắn là đến thời điểm hiện tại, công nghệ và khả năng xử lý hình ảnh cho VGV đã được cải thiện rất nhiều, đem lại cho VGV sự ổn định, tin cậy và hiệu quả.
3.Phương pháp định vị bằng Line từ, điểm từ
Với phương pháp này thì AGV sẽ sử dụng cảm biên từ trường, kết hợp với cảm biến la bàn, cảm biến gia tốc, cảm biến con quay hội chuyển để xác định được phương, hướng và đường đi của thiết bị. Phương pháp này có ưu điểm là giá thành rẻ, ít đòi hỏi về chuyên môn với người vận hành nhưng lại có nhược điểm là tốn thời gian và công sức khi muốn thay đổi khu vực làm việc cho việc dán lại Line từ, bố trí lại điểm từ.

Robot tự hành agv của công ty IDEA được dẫn hướng bằng line từ
Trên đây là 3 phương pháp xác định vị trí của AGV và dẫn hướng trong không gian, cảm ơn tất cả các bạn đã quan tâm.