27
9月
昨今の製造業界では、人件費の高騰や人的トラブルによる問題が大きくなってきています。その流れで生産ラインの自動化は不可欠といっていいほど、重要になってきているのが現状です。そこで今回は、
生産ラインの自動化を検討している
生産効率を改善したい
事例を知りたい
といった悩みにお答えしていきます。
生産ラインの自動化について検討していたり、自動化の現状など気になっている方は、ぜひ参考にしていただければ幸いです。生産ラインを自動化して、
省力化、省人化してコストダウンしたい
生産性アップして売上を上げたい
人的ミスを減らして品質価値を高めたい
どのメーカーの装置、ロボットを使えば効率的かわからない
1.生産ラインを自動化する企業が増えている理由
生産ラインを自動化することの重要さを感じている企業では、すでに自動化に向けての取り組みが行われてします。
自動化の重要性については以前から言われていましたが、どうして最近になって注目され始め、導入する企業が増えてきているのでしょうか。その理由としては、
国内外問わず人件費の高騰
慢性的な人手不足
生産性の見直し
といったことがあげられます。
いままでの製造の流れは、安い賃金で大量の労働者を雇うことで生産性を保っていました。
しかし、最近では海外においても人件費が高くなり、以前までのような生産方法ができなくなってきているというのが現状です。
また、働き方の多様性により、人手不足はどの工場でも起こっています。これからその流れが大きくなっていくことは明らかです。
そうすると、いくら工場で生産したくてもできないような状況になってしまいます。
そこで、生産ラインの自動化が注目されるようになってきました。
2.生産ラインを自動化する目的
生産ラインを自動化する目的について紹介します。
(1)生産性の向上や品質の安定性を高めて利益を最大化する
生産ラインの自動化をする目的は、企業によって変わってくるかと思います。
ただし、共通しているのは「利益を最大化」すること。
生産ラインを自動化することで、「生産性が向上」や「品質の安定性」が期待できます。
最終的には利益に繋がるため、生産設備の自動化はどの企業にとっても検討すべきと言えます。
(2)4M(人・機械・材料・方法)によるマイナス要因を排除する
生産をするにあたって、「生産性」や「品質」には製造の「4M」と呼ばれる以下のことが大きく関係してきます。
Man:作業者・人的な要因
Machine:機械設備・設備的な要因
Material:原材料・材料に関する要因
Method:作業方法・方法に関する要因
製造に関する生産性やトラブルなどは、すべてこの4Mが要因です。
最近では、「Media:情報に関する原因」「Management:管理に関する原因」Environment:環境変化による原因」が加わって「6M1E」なんてことも言われますが、大きくは上記の4Mが重要になってきます。
中でも、「Man:作業者・人的要因」は4Mの中でもっとも重要な部分。なぜなら、他の3Mにすべて関係するからです。
すべての要因に関係している「作業者」を「ロボット」に、つまりは生産ラインを自動化させることによって、生産性や品質の向上に繋がっていきます。
3.生産ラインを自動化するメリット
とは言っても、生産ラインを自動化してどんなメリットがあるのか、具体的にイメージしづらいかと思います。
なので、生産ラインを自動化するメリットを解説します。
生産ラインを自動化するメリットとしては、
生産性の向上
品質の安定
不特定要因の排除
人件費の削減
といったことがあげられます。
(1)生産性の向上
人間が24時間働き続けることは不可能です。
もちろん交代勤務で働き続けることはできますが、やはり限界はあります。
ロボットであれば、24時間365日稼働し続けることが可能。また、人より速いスピードで作業できるため、生産数は格段とアップします。
例として、生産ラインを自動化した設備は、作業者を3分の1にしたにも関わらず、生産量は従来の3倍にアップしたケースもあります。
(2)製品の品質が安定する
どうしても人による手作業では、同じ工程だとしても、
作業者の熟練度
作業者の体調
などの人的要因によって、製品の品質や生産数にバラつきが出てしまいます。
ロボットであれば、だれが操作しても一定の品質を保ち続けることが可能です。
(3)原因が特定しやすく改善までスムーズにできる
製品ができるまでには、さまざまな要因でバラつきが生まれます。
もちろん人的ミス(ヒューマンエラー)により不良品が出ることもありますよね。これは人間である以上避けられません。
これらのヒューマンエラーは、「寝不足で作業が正確でなかったのか」「そもそも生産方法に問題があってたまたま出た欠陥品なのか」あまりにも不鮮明なため対処や改善が難しいのが現状です。
生産ラインを自動化することで、不良品やトラブルが起きたときの原因が特定しやすくなります。また、データを見れば問題点も見つけやすいので、すぐに改善できるでしょう。
(4)人件費の削減につながる
生産ラインを自動化することにより、人件費を大幅に減らすことが期待できます。
工場全体で必要な作業者の人数を減らせますし、作業者が急にやめた場合に必要な人材を確保するための突発的なコストも抑えることも可能です。
4.生産ラインの自動化を導入して改善された事例
※画像はイメージです。
製品名
納入先
用途
実現したこと
使用されている技術
自動車部品の組立装置
自動車業界
省力化・省人化
機械による省力化を実現。手作業でやると、製品にばらつきが発生するものを抑止。
・Z折
ワークを山折り谷折りして収納をする。
ワーク一枚をきれいに折りたたむ高度な技術を使用しています。・自動昇降機
高さを調節する。作業をする方の身長に合わせることができます。・人に優しい装置
装置と人との共同作業をするものなので、手を挟んでも痛くないように調整してあります。・自動速度調整
ロールしながら折っていくので、経が膨らんでいきます。
早く巻きすぎるとワークが破れたり、遅く巻くと
それを防ぐために、ロボットが降りてくる速度と回転速度を調整しています。
PLCで回転スピードと加工スピードの協調性を確立。・治具の多品種対応
ワークの取り外しや取り付けがワンタッチで作れるようにしています。
※画像はイメージです。
製品名
納入先
用途
実現したこと
使用されている技術
工業用インクジェット式のプリンタのヘッドの組立
OA機器業界
省力化
XYZを用いて自動的に接着剤を塗布する。それにより塗布位置・塗布量の安定化を実現し省力化。
・XYZのロボット
塗布位置を任意の位置に指定することが可能。PLC制御を行っています。・接着剤の塗布システム
定量塗布を実現。
一つの装置でUVと接着剤の塗布ができます。・UV照射のシャッター
目で見てしまうと失明の恐れがあるので、シャッターを設けて、外にUVが漏れないようにしています。・接着剤を塗布する前に清掃
清掃をしないとニードの先に接着剤が詰まる可能性があります。そのため、常に清掃してから塗布をし、定量塗布を実現しています。・エリアセンターの取り付け
引き込み位置に人が入ると止まるよう安全に設計
5.生産ラインの自動化に対する課題やデメリット
生産ラインを自動化するとさまざまなメリットがあります。しかし、自動化にはまだまだ課題やデメリットがあります。
なので、自社の状況と目的によって自動化を導入するのか検討しましょう。
今回は、生産ラインの自動化を導入する際に大きく考えられるデメリットや課題点を紹介しておきます。
(1)導入コストがかかる
生産ラインを自動化するにあたって、一番の問題が導入時にかかるコストですよね。
技術者の育成や雇用
関連するライン設備との連携
安全面の確保
など、ロボット導入以外にもコストはかかります。
生産ラインを自動化するにあたって、必要な費用をすべて計算しないといけません。
とは言っても、まずはロボットの導入にどれだけのコストがかかるのか把握しておかないと概算でも計算できないため、見積もりを取っておくのが賢い選択と言えるでしょう。
(2)無人化までは難しい
生産ラインを自動化したとしても、完全な無人化までは難しいのが現状です。
ロボットの調整
メンテナンス管理
細かい部分での人的作業
上記のような、どうしても作業者が必要な部分は、まだまだ自動化するのは難しいかもしれません。
しかし、100%できない訳ではないため、自動化をしてほしい部分があるなら一度相談してみるといいです。
(3)優秀な人材が必要になる
ロボットの導入により、作業者としての人材は必要がなくなります。
しかし、新たにロボットを導入してからは、「操作・管理」ができる人材が必要です。
自社で育成するのか、採用するのか、もちろんそのまま外注に依頼することもできます。
どのような選択にしても、新たな人材は必要なので、考慮しておきましょう。
Post Views: 3
read more

10
5月
産業用ロボットのアプリケーションでは、アーム ロボット (ロボット アームとも呼ばれます) が作業の精度と速度に大きな影響を与えます。 この記事では、ロボットアームの使い方を簡単に説明し、良い製品を選ぶ方法と基準を紹介します。 さらに、この記事では、アーム ロボティクスの分野におけるエンタープライズ ランキングと上位 10 社についても言及しています。
1. アームロボットとは
現在の産業用ロボットは、アーム型の垂直多関節ロボットが主流です。 アームロボットは、人間の手のような機械的なアームの一種であり、事前にプログラムされ、プログラムによって連続的に操作および制御されます。
ロボット アームという用語は、マシン デバイス全体を指す場合もあれば、ロボットの大きくて複雑な部分を指す場合もあります。 接続部品は、力と円運動の伝達を可能にする「シャフト」と呼ばれるカップリングによって接続されています。
6軸、2リンク一体型、3関節で可動する万能ロボットアーム。
2.動作原理
アクチュエータ
アクチュエータは、ロボットの関節を構成する重要な要素であり、アームが上下に動き、回転するのを助けます。
動力伝達では、電気が最も一般的な形式ですが、油圧と空圧も一般的に使用されます。一部の部品に使用される油圧は、大きな力が発生しやすく、外的影響が強いという特徴があります。
ギヤードモーター
ギヤードモーターは、モーターのパワーを上げるための装置です。歯数の違う歯車を組み合わせて回転数を1/10に落とすとモーターのパワーは10倍になります。この装置は自転車のスプロケットに似ています。自転車では、ホイールのギアのサイズが常に異なります。通常、自転車は後輪のギアを変更するために使用します。このギアを最大ギアにして、回転数を最小にすれば、ペダルが軽くなり、速度が遅くなり、上り坂でも楽になります。つまり、出力電力を大きくすることができます。
エンコーダー
エンコーダーは、モーター軸の位置(角度)を確認する装置です。エンコーダーを所有することで、ロボットはロボットがどの方向にいて、どこに移動しているかを知ることができます。従来の光学式エンコーダには、モータースピンドルに回転ディスクが装備されています。ディスクにはシステム内で光が通過するスロットがあり、発光ダイオードと受光ユニット (フォト ダイオード) は、両側の光強度... read more

05
3月
湯葉は日本料理の一般的な材料だ。豆乳を茹でて表面の膜を剥がして作られている。マンサクまたは味噌としても知られる豆腐気は、大豆から作られた製品だ。
湯葉の画像
豆の調理過程で、タンパク質と脂肪を含む豆の薄層が豆のミルク鍋の表面に形成される。人々はこの薄いフィルムを手に取り、それを乾燥させて豆腐を作る。
豆腐は、日本語でToufuと呼ばれ、大豆を使った食品で、通常は特に臭いはないが、調理や調理がとても簡単だ。これは一種のバーフードなので、多くの人、特に菜食主義者にとっては食べやすいだ。
日本では、東風は一般的な食べ物であり、味噌汁、角ジルスープ(ワインの残り物などを使ったスープ)、鍋料理でよく調理される。中国では、豆腐の種類が日本よりもはるかに豊富で、さまざまな料理に加工されている。ベトナム料理、韓国料理、カンボジア料理、タイ料理、ビルマ料理などにも親しまれている。現在、アメリカでは豆腐が好きで食料品店で売られている人も多いだ。
豆乳を炊くと、湯葉と呼ばれるラムスデン現象により、たんぱく質と脂肪の膜が水面に浮き上がる。ベトナム語では、プーチュク、豆腐ケンタッキーと呼ばれ、菜食主義者に使用されるタンパク質が豊富な食品だ。湯葉には、たんぱく質が約50〜55%、脂肪が24〜26%、水分が9%、炭水化物が12%含まれている。
日本では、湯葉は主に菜食主義の料理に使用され、約1200年前に僧侶Saichouが仏典やお茶と一緒に本土からそれを持ってきたときに中国から日本に紹介された。 湯葉は、日本の仏教の祖先の山である比叡山の麓で韻として最初に登場した。 子供たちは、「山の僧侶は生きるために何を食べますか? 彼はプーチュク(湯葉)と漬物を食べて生きました。」 湯葉料理は、比叡山(現在の滋賀県)にある天台宗の延暦寺から、京都、大海、日光などの商店街に受け継がれた。
出典:https://japanduhoc.com/
ittctech-vn.com
Post Views: 1
read more

30
6月
今日、大規模および中規模の工場は、インダストリーレボリューション4.0というトラックに追いつくためにデジタル化を急いでいます。工場の生産性を最適化し、発生するコストを最小限に抑えるために、多くの科学技術の成果が徐々に適用されています。AGVは、妥当な費用と労働者をサポートするための柔軟な機能により、製造スペースでおなじみの無人搬送車です。近年、AMRの導入により、自動搬送車システムの新たな転換点になってきました。
Table of Contents
Toggle
I.AMRの特徴II.生活におけるAMRの適用
I.AMRの特徴
AMR(Autonomous Mobile Robots)は、自律走行型の自律移動ロボットとも呼ばれます。AMRとAGVはどちらも、工場や倉庫の商品を特定の場所に輸送するという一般目的を持っています。それは多くの動きと労力を必要とする作業で人間をサポすることです。ただし、AGVと比較したAMRの新機能は、いくつかの分析だと紹介したいと思います。
1.安全性
AMRは、近くの環境を認識するために高度なセンサーとプロセッサーを使用します。AI、MLアルゴリズムに基づいて自律的に動作します。AMRには、LiDAR(光検出と測距)、UWB(超広帯域)、カメラ、超音波などのセンサーが装備されており、アクティブエリアをマッピングします。障害物がある場合、ほとんどのAGVは減速して停止します。特に、AMRは障害物を柔軟に回避し、別の方法で作業を続けることができます。それで、ロボットが独立して動作する場合、またはロボットが人間と連携して動作する場合に対して、スタッフは完全にすることができます。
2.柔軟性
どちらかというと、電車と車の画像のような2つのデバイスAGVとAMR。AGVは列車のようなもので、固定された線路で動作します。逆に、AMRは、渋滞に遭ったときに車が路上を自由に移動できるように、柔軟に方向を変えることができます。通常、AGVは、移動できるようにするためのラインの作成、磁気テープの取り付けなど、インフラを刷新する必要があります。AMRでは、ローカライズによりナビゲーション装置は必要ありません。
II.生活におけるAMRの適用
1.病院および医療施設
AMRは、看護師の調整の下、入院室での医療機器、医薬品、または汚れた衣服の輸送をサポートします。特に、新型コロナウイルス感染症(COVID-19)の流行が広がっていたときでさえ、AMRは、不妊の場所に入る人々に取って代わることができたとき、医師にとって効果的な武器でした。これにより、相互汚染の可能性が減少します。
2.倉庫
AMRは、倉庫内を柔軟に移動したり、輸送をサポートしたり、ものを持ち上げたり、製品コードをスキャンしたりできます。AMRはマルチタスクできるため、時間と労力を最適化できます。その上、ロボットの参加により、人為的な誤が制限され、在庫管理が瞬く間に行われます。
3.レストランホテル
信じられないと思われるかもしれませんが、AMRは、食事の配達や洗濯用の衣服の受け取り、ゴミ、ゲストの部屋への正しい案内などの日常業務を行うことをスタッフに完全に取って代わることができます。サービス業界におけるAMRの存在は、管理をサポートするだけでなく、事業所のハイライトを作成します
AGVとAMRはどちらも人間にとって有用です。ただし、それらの間には異なるアプリケーションがあります。AGVは、原材料の輸送、仕分け、梱包など、固定、複雑さの低い、反復的なタスクに対してより効率的です。AMRを使用すると、より多くの分野で使用され、ロジスティクス、検査、建設など、より高い柔軟性、より大きなワークスペースを必要とするタスクに適しています。
Post Views: 1
read more
21
7月
誰もが日本の機械図面を深く理解し、正しく読むことができるわけではありません。 では、どのように図面を正しく読むのですか? 以下の記事で日本の機械図面の読み方を一緒に学びましょう。
JIS規格とは何ですか?
JIS規格(英語:日本工業規格)は、この国の産業活動で使用されている日本の工業規格です。
ベトナムの図面とは異なり、日本の図面は端から垂直への投影レイアウトを持ち、JIS規格である第3角度投影法(図)に従って使用されます。 また、処理内容が複雑で処理要件が明確に示されている場合は、切断図を使用して図面を抽出します。
日本の機械図面(JIS)の読み方
JIS規格に準拠したプロジェクションのレイアウトと作成方法を理解するには、以下をお読みください。
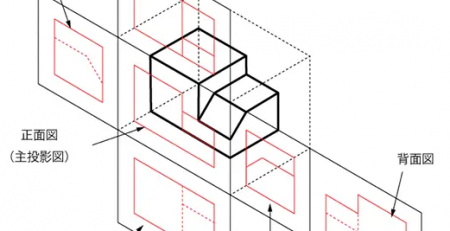
図にシンボル平面がある長方形のボックスがあるとします。
外から見ると、オブジェクトが平面を通過し、対応する線(表示または非表示)とともに長方形のボックスの面を示しています。
ボックスの平面(以下に表示)を開くと、それぞれの面に対応するオブジェクトの投影が表示されます。
同じ平面上に広がるボックスの平面は、オブジェクトの投影平面になります。
その結果、各オブジェクトには6つの対応する平面がありますが、通常は3つの面だけで十分です。単純な場合は2つの投影ですが、複雑な場合は、最大6つの面を投影し、すべてのオブジェクトを表示するために画像を切り取って抽出する必要があります。その中で、プロジェクションは常にオブジェクト全体を見ることができるメインビューを持っています。
明るいオブジェクトの2Dモデルから投影を描画します
上記の基準を適用することに加えて、正確かつ迅速に描画できるようにオブジェクトを想像する方法も知っている必要があります。
–オブジェクトから、次の2D投影を描画します。
–上記のように、対応する投影を描画して配置します。
描画するときは、オブジェクトを最も明確かつ簡単に視覚化できる面を描画する必要があります。 同時に、オブジェクトを視覚化するのに十分なだけ、破線の方向と投影の数を制限します。
2Dモデルの投影から実際のオブジェクトを構築する
2Dビューから実際のボディを構築するには、技術者は上の画像を表示するルールを習得する必要があります。
2D図面からオブジェクトの作成まで、3Dオブジェクトを視覚化する必要があります。 これは、設計図を読むことの究極の目標です。
– 2D投影から、次のようにオブジェクトを作成します。
編集を開始するときは、画像がオブジェクトを使用するように、投影からオブジェクトをスケッチする必要があります。 次に、残りの形状に基づいて次のオブジェクトを作成し、ブロックをカットまたは追加できます。
参照元:blog.mecsu.vn
You've just added this product to the cart:Automated... read more

26
1月
豆腐は大豆から作られ、低いカロリー、脂質、ビタミン、また重要なミネラル を持つものだ。さらに、心臓問題削減、がんを予防する、アンチエイジング剤という質も含まれる。
生豆腐は繊細でかっこいい味。日本の飲食に対して、以下の有名な各種豆腐を見越しないでください:
キニ豆腐(シルケン)やわらかい豆:
以上の豆腐類は、豆乳とニガリ塩水を結び付け、豆腐に沈殿するまで、加熱し。キニ豆腐は、さわやかで甘く滑らかな豆で、冷たいままで、ソース、醬油、ネギ、ワサビと一緒に食べ。しかし、柔らかい表面のシルケンは作りにくいだ。
モメン豆腐‐硬い豆腐:
Silken 豆腐から作られ、強く圧縮してから、固い成形られたものだ。すき焼きなどの日本鍋に作るとき、欠けられない材料の一つだ。
ゴマ豆腐
日本の料理中には豆腐みたいあるが、ゴマ豆腐のように豆乳を固めて、作らないだ。ゴマ、水、クズ粉から作らられ、冷たくして、少し醤油とワサビと一緒にたべる。
油揚げとあつげ–揚げ豆腐:
油揚げは豆腐の一種類で、薄く切る、金色のサクサクと膨らんでいるまで揚げたものだ。この豆腐は、味噌汁、きつねうどん料理に使用するために、さまざまな詰め物を詰めたり、スライスしたりすることができ。 厚いバージョンは油揚げで、豆を揚げて自分で食べることも、ソースと一緒にスープやシチューと一緒に食べることもでき。
コヤ豆腐
これは凍結乾燥豆腐で、通常は水に浸す。 その後、スープで調理し、醤油みりんを添える。
Tofuyo
TofuyoはAwamori酒と米、紅酵母 に長く浸した醗酵の豆腐から作られた豆腐だ。米と紅酵母が醗酵の過程に速くさせる。紅酵母がありから、特別な赤色をもっている豆腐だ。
ソース: www.ittctech-vn.com
www.shinbashi.com.vn
Post Views: 1
read more

22
6月
吉野彰氏はエンジニアであり、1970年に京都大学を卒業し、1972年に修士号を取得した。その後、旭化成会社に化学エンジニアとして採用された。
2019年ノーベル化学賞を受賞した吉野彰氏
それ以来、彼の生涯はリチウム電池に関連した。 その後、50歳以上のときに大阪大学で化学の博士号を取得。 彼は、充電式電池としても知られるリチウム電池の製造に成功したことで大きなメリットを持っている人物だ。
リチウム電池とは何だか?
バッテリーは、使用済みエネルギーを蓄えるために使用されるデバイスの一種であることが知られている。 電気を使用する代わりに電気機器は、電池を使用して機器が希望どおりに機能する。 ただし、一定の貯蔵寿命を持つバッテリーの場合、エネルギーがなくなったときに再充電する必要があるバッテリーがあり、一方、交換する必要があるバッテリーもあり。
リチウム電池は、今日最も一般的に使用されている充電式電池だ。
リチウム電池またはリチウムイオン電池とも呼ばれるリチウム電池は、充電式電池だ。 使用中、リチウムイオンは負極から正極に移動する。 バッテリーがエネルギーを使い果たして再充電すると、これらのイオンは正極から負極に戻り。 したがって、リチウム電池は電極材料としてリチウム化合物を使用する。
このバッテリーのおかげで、世界は大きく変わった。 電動自転車、電動バイク、電気自動車、電気のない状態で使用できるコンピューターがあり。 また、機内には大型のロチウム電池を搭載しており、お客様がテレビを見たり、映画を見たり、その他の活動をしたりすることができ。
リチウム電池は、電話、パソコン、車などの身近なデバイスに適用される。
このような多大な貢献により、彼と2人の技術科学者は2019年にノーベル化学賞を共有した。ノーベル賞の総額は999,999米ドルで、したがって、各自が333,333米ドルを共有する。
また、ノーベル賞は博学者の教授にのみ授与されるとよく考えられるが、現実にはそうではないだ。そして吉野さんはその代表的な例だ。彼は私たち機械エンジニアが毎日行うのと同じ仕事をしただけだ。彼はバッテリーの発明に人生を捧げた。彼は、このバッテリーの製造を成功させた米国での特許を除いて、論文も重要な科学的研究も発表していなかった。これは、科学が崇高なものではなく、小さなものから大きなものへと貢献していることを示している。重要のは仕事への情熱でもっているだ。
この話を通して、若い機械技術者がもっと頑張ってくれることを願っています。おそらくいつか、あなたが素晴らしい成果を達成し、現在の伝統的な技術の変化に貢献することを祈ります。
参照元:ウィキペディア、Dancokhi.net
Post Views: 1
read more

29
6月
足だけで商品が買えるのなら、まもなく紹介する自動販売機は、COVID-19流行時の一時的な「心理的」自動販売機になり。
世界で最大かつ最も多様な自動販売機を保有する国として有名な日本は、この分野への投資と開発を続けている。 日本にはソフトドリンクの販売だけでなく、食品、衣類、アクセサリー、雑誌、漫画などの自動販売機もあり。さらに、ゴールドの自動販売機、ロブスター自動販売機や靴の自動販売機など、よりユニークな自動販売機もあり。
日本のアロブスター自動販売機
最近、日本企業のDyDoが、Covid 19シーズン中のユーザーとの接触を制限する目的で、自動販売機「Useyourfeet」のテスト製品を発売した。
DyDoは足で操作する自動販売機を発売する。
同社によれば、これはシンプルでありながら効果的なデザインであり、非常に使いやすいという。 この機械から購入するには、まず足を使って、機械のすぐ下のボタンパネルで購入したい商品に対応する番号を選択してから、収納ボックスのドアであるピックアップドアのペダルを踏み。が開き、ドアを開けなくても簡単に商品を受け取ることができる。
ステップ1:足を使って、マシンの下にあるキーを踏んで購入したい製品を選択する。
ステップ2:右のペダルを踏んでドアを開け、製品を入手する。
この機械は、多くの人が公共の機器に触れることを恐れているため、過去に自動販売機の売り上げを失うという問題を解決するためのスマートで実用的なソリューションであると言われている。 同時に、現金以外の支払い機能と組み合わせると、顧客は使用時の衛生状態もある程度保証される。
DyDoによると、自動販売機は現在コンセプト段階にあり、テスト中だ。 将来的には、予約注文をしたり、製品が顧客に届く前に下部トレイのUVランプで製品を殺菌したりするなど、この自動販売機にさらに多くの機能を統合することも可能だ。
自動販売機には、COVID-19パンデミック時の健康を保護するために、追加のマスクと消毒組織があり。
参考ソース:kilala.vn
You've just added this product to the cart:ĐỒ GÁ GIA... read more

10
6月
神戸大学(日本)の研究チームは、5G 高速モバイル ネットワーク技術を使用して、この国で製造された ヒノトリロボットを介して遠隔手術を行うテストを開始した。
複雑な手術にはヒノトリロボットが使われています。写真:nippon.com
手術をサポートするヒノトリロボットは、過去にがん患者の手術に成功してきましたが、手術を行うためには、依然として医師が手術室にいる必要があり。しかし、この試験では、日本の科学者が通信会社NTTドコモの5G技術を利用して、患者の腹壁血管シミュレーターの遠隔解剖を行うことに成功した。
研究チームは4月16日に、テスト期間中、リアルタイム回線での画像送信やロボットの動作遅延について、指定されたものに比べて遅延はなかったと述べた。今後、同様のテストを何度も行い、画像の伝送速度の変更や情報セキュリティなどの残された課題を解決していきる。
神戸大学の藤沢正人学長によると、この試験の最初の目標は、患者を手術している医師が予期せぬ事態に遭遇したときに、熟練した医師が遠隔で患者をサポートできるようにすることだ。次の段階では、チームは動物実験を実施し、その後、人間での臨床試験に移行する。
これまで、放送局間での安定した伝送は、情報伝送方式によって実現されてきた。 しかし、日本では放送局と病院間の接続品質にばらつきがあり、専用の伝送路の建設には費用がかかり。 5Gネットワークの適用は広く展開されており、将来の遠隔診療のトレンドを実現するためのより実用的で効果的なソリューションだ。
ドゥク・ティン (TTXVN)
Post Views: 1
read more

01
7月
父親が手で石を割るシーンを目の当たりにして、母親は苦労でケーキを蒸しました。 父が病気になって石を割ることができなかった日があり、家族は収入源を失い、貧困に陥りました。 そのため、工業生産と建設用の機械を発明するという夢は、若者の中で毎日燃え続けていました。
「私は子供の頃から、このような店を開くことを夢見ていました。これが夢なのか本物なのかを考えることもありましたが、今でも自分の持っているものが信じられません」-機械の所有者である若い男性のDang Quoc Vinhビエンホア市(ドンナイ)で26歳のワークショップ。
9Xエンジニアが注文に従って新しいマシンを処理しています
Vinhさんの35m2の機械工房は、ドンナイのビエンホア市のタンビエン区にある国道1Aから約50mの小さな路地にあります。ハンマーと爆発の音がするにぎやかな空間で、3人の労働者が一生懸命働いた。若いオーナーが労働者を案内し、優しい笑顔で話してくれました。
一見、成熟した男が26歳だとは誰も思っていなかったのですが、不思議なことに、「この仕事をするのは、他の人に任せておく以外に、もう剃る時間がありません。私は思います。信じるのに十分な年齢です。」
カントーの農民の家族に生まれたヴィンの子供時代は、一連の困難な日々でした。子供の頃、父親が手で岩を割るのを目撃し、母親は薪鍋でケーキを蒸しました。父親が病気で石を割ることができなかった日があり、家族は収入源を失い、貧困に陥りました。そのため、工業生産と建設用の機械を発明するという夢は、若者の中で毎日燃え続けていました。
その懸念から、ヴィンは高校を卒業した後、ラックホン大学の電気電子工学科に入学しました。大学で4年間勉強し、名誉をもって卒業した後、安定した収入のロボットを製造する外国企業に受け入れられました。 2年間働いた後、機械に関するVinhの夢は、Vinhに機械修理ワークショップを開き、工業生産用の機械を処理するという夢の仕事をあきらめました。それ以来、この仕事は9Xの男に固執しています。
イラスト
Vinhは、2年間の作業で節約された7億ドルから始めて、大胆に施設や労働者を借り、生産用の機器を購入しました。数え切れないほどの困難を伴うスタートアップの初めに、Vinhは今ではそれらを血まみれのレッスンと見なしています。エンジニアが作った最初のタオル乾燥機は機能せず、Vinhはほとんど精神的に疲れていました。 1億5000万の損失には、若いエンジニアを落胆させる時間と労力は含まれていません。
ヴィンは当初、4人の労働者を雇うために工場を開いたが、あまりすることはなかったと回想している。彼は毎日、賃金と家賃のために頭痛の種で行き来した。言うまでもなく、安い建材や動かない機械をどこで買えばいいのかわからなかったため、若いオーナーは最初から考え直すのに何ヶ月もかかりました。
「家族のサポートのおかげで、その時代を復活させることができました。時には、労働者の賃金を節約するために、1週間インスタントラーメンを食べることもありました。自信がありすぎて、動き方を慎重に計算していないので、そのようにつまずきます。今、当時を振り返るたびに、「取りつかれている」と感じ、もっと頑張ろうと自分に言い聞かせます」とヴィンは語った。
一連の機械の発明に成功
最初の失敗の後、ヴィンは周りのみんなの反対に直面しました。今回は最初から細心の注意を払い、前任者の先生に相談し、経験豊富な方から実践を学びました。
しかし、現時点では、資金は利用できず、多くの裁判は失敗し、米と米の圧力は常に存在していますが、ヴィンはまだあきらめていません。彼は何晩も起きて、機械が動くまで研究と組み立てをしました。
長い間試みた後、神は人々を失望させなかったのは事実です、彼は7000万VNDで注文された家庭の肉プレス機を作ることに成功しました。この機械は、丸い肉片をプレスして詰め物を作るために使用されます。ユーザーの時間に合わせて調整するユーザーのレベルに応じて、1秒/ 1個の最大速度で動作します。
これまで、2年間の事業開始後、9Xエンジニアは、工業生産と建設に役立つ約20台の機械の製造に成功しました。さらに、彼はまた、建設プロジェクトのための機械、プロセスブリッジ、および工場の修理と保守も請け負っています。
イラスト
「どの機械を注文しても、大量生産して販売するのではなく、製造します。図面は私の頭の中にあります。人々がマシンについて簡単に話している限り、私はそれをスケッチしてすぐに構築を開始します。各マシンの価格は、タイプと顧客によって異なります」とVinh氏は付け加えました。
2年後、すべてが徐々に安定しましたが、この若い男との困難はまだ続いていました。ヴィンは次のように疑問に思いました。「ビジネスマンにとっては常に困難がありますが、今では資本と労働の面で非常に困難です。工場には現在10人の労働者がいますが、一方のグループが工場を維持し、もう一方のグループがワークショップにとどまっているため、十分ではありません。その上、顧客が商品を購入するのに遅れ、生活と生産のためにお金を払わなければならないことがよくあります。」
最近の成功であるVinhは、乾燥したコンクリートレンガを切断するために使用される超軽量のAACレンガカッターを作成しました。このタイプの機械は、正方形で滑らかで美しいカットレンガである市場の他の機械よりも特別です。機械はシンプルで使いやすく、ほこりが少なく、市場価格よりもはるかに安いように設計されています。
機械を作り始めるたびに、ヴィンは常に2つの問題について考えます。それは、コストと、資格のない人、熟練していない労働者がそれを使用できるかどうかです。これらの2つの質問に答えた後、Vinhは機械の製造を開始しました。そのおかげで、彼が作った機械は常にシンプルで、操作が簡単で、使いやすく、高効率をもたらします。
ヴィンは将来の計画について次のように述べています。「今日の結果は、研究と発見の長いプロセスです。将来、人々を助けるために多くの機械を作ることができることを願っています。」
Duc Nghia
IDEAでの売れ筋商品:
You've just added this product to the... read more